
{kind=link}
機械人手臂在日常生活中經常都會使用,特別是在大型工業的生產線中,協助人類處理重覆性及效危險性的工作,例如焊接、汽車生產、噴油等等。
常見的機械人手臂會仿照人類手臂的關節移動,又稱為「關節型機器人手臂」。一般有三個或以上的轉動軸,其中一個在基座上旋轉,另外兩個就不同方向轉動,使能夠進行水平和垂直的移動。液壓機器人手臂就是運用水壓體力學的原理,來驅動不同鉸位的活動。

甚麼是「水壓體力學」?
利用兩個膠針筒和一條膠管,可用作解釋水壓體力學的原理:
1. 把其中一個膠針筒注滿水。
2. 接駁膠管後,把另一端放入水中。
3. 把注了水的膠針筒的水推出把膠管的空氣排出,再抽滿水至膠針筒和膠管內。
4. 把膠管的另一端接駁至另一支膠針筒,簡單的水壓動力裝置就完成了。
[row][double_paragraph]  [/double_paragraph][double_paragraph]
[/double_paragraph][double_paragraph] 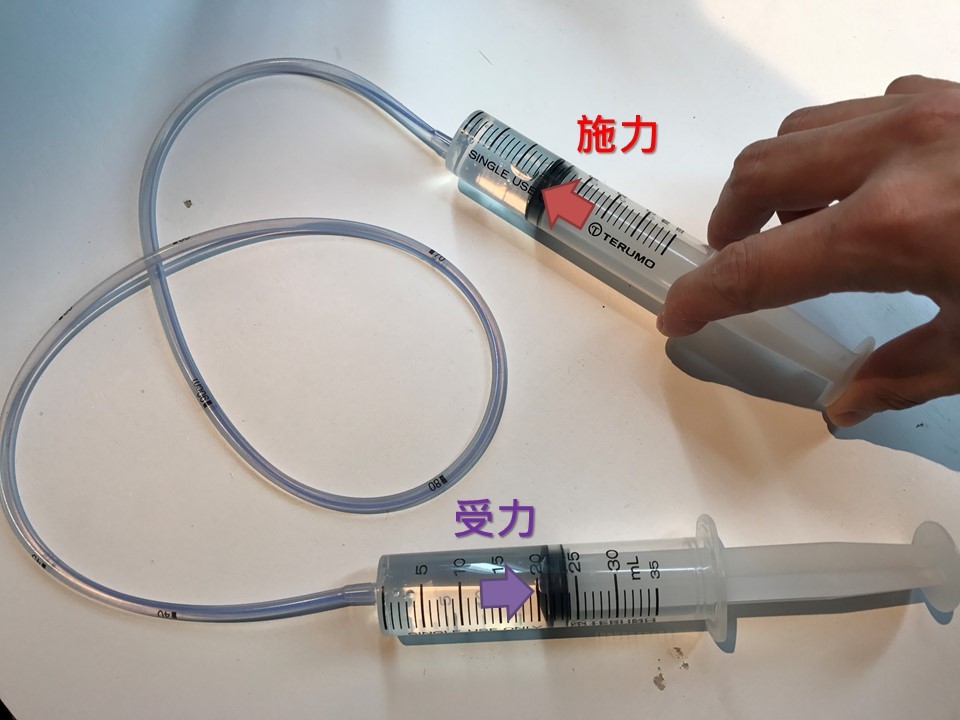 [/double_paragraph] [/row]
[/double_paragraph] [/row]
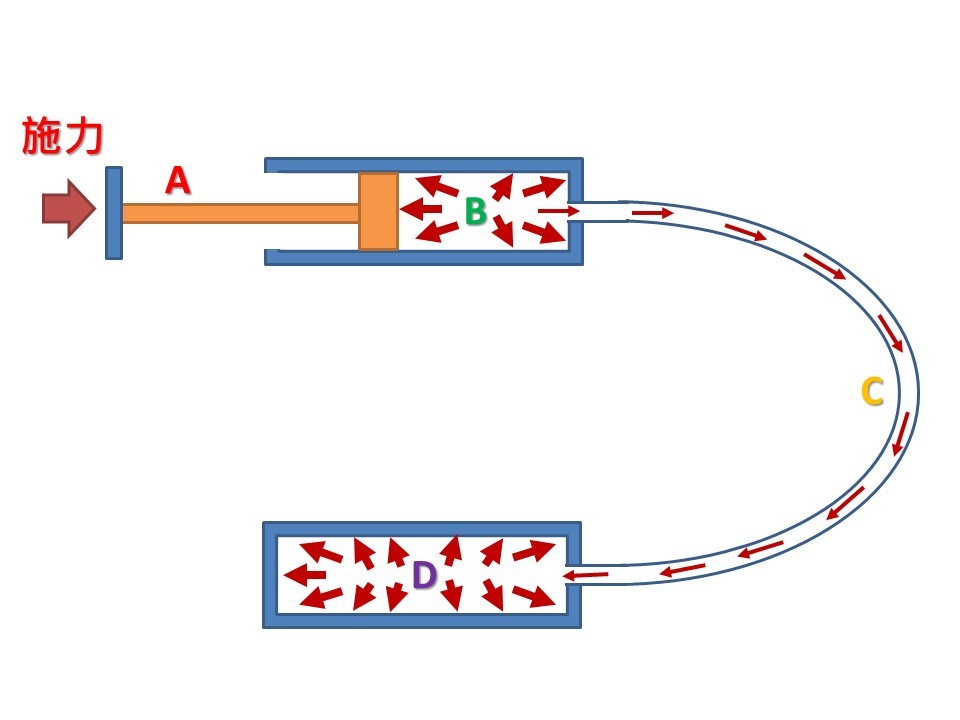
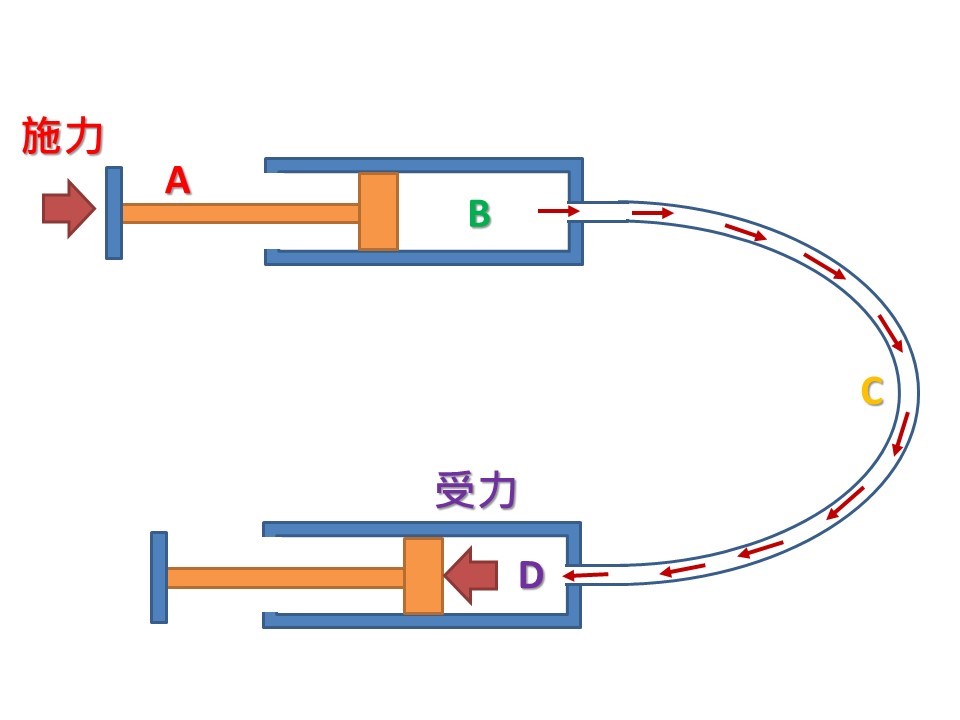
只要推壓注滿水的針筒,水便從針對走到另一針筒,產生水壓來推動另一針筒移動,整個過程就是能量轉移,力量由一端傳至另一端,而另一端所接收的受力和施力差不多。
機器人手臂內藏科學
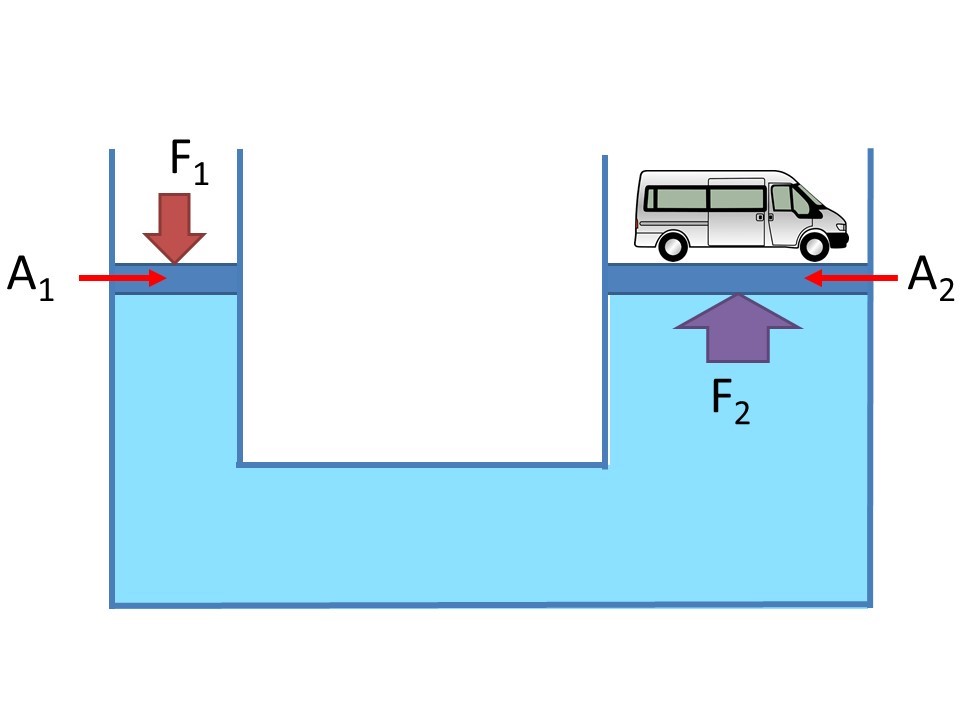
計算帕斯卡原理
在帕斯卡原理中,提及到水壓動力裝置,而計算壓力的公式是:
壓力 (P) = 力 (F) / 面積 (A)
根據公式,如果在施力一方的活塞面積效小,而受力一方的活塞面積效大,操作上可以使用較小的人力去推動或抬起重物。
[row][double_paragraph]
[/double_paragraph][double_paragraph]

[/double_paragraph] [/row]
液壓機臂工程手運作
液壓機器人手臂的好處是在不需要連接電池或電動機,只需透過操作控制桿接駁氣缸及膠管,再施加力到盛滿液體的氣缸,就可改變「水壓」來操作的機器人手臂不同關節的活動。
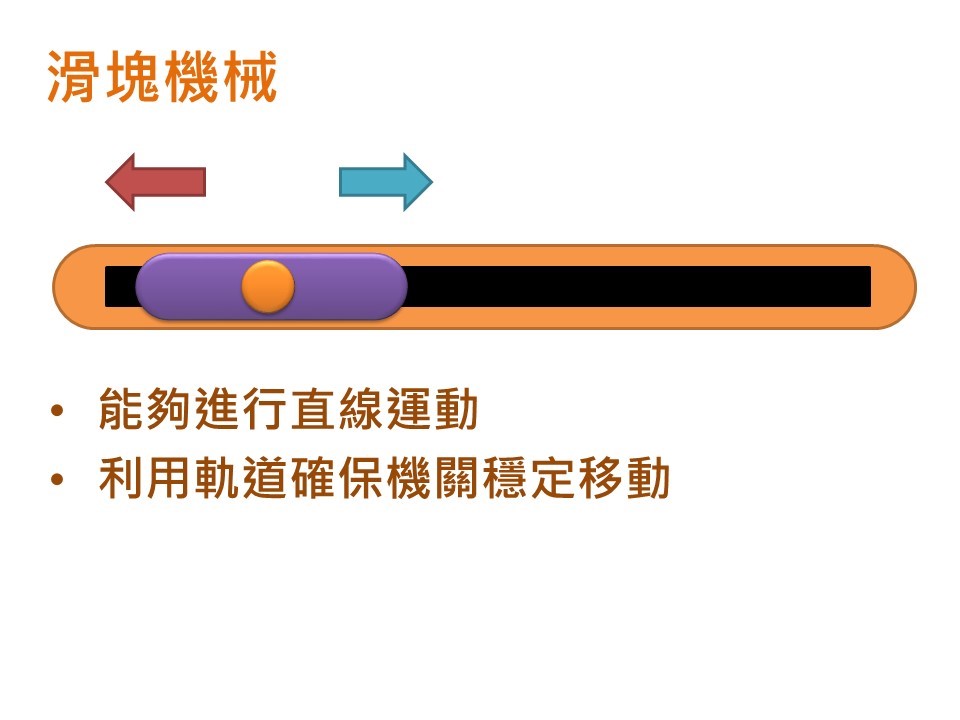
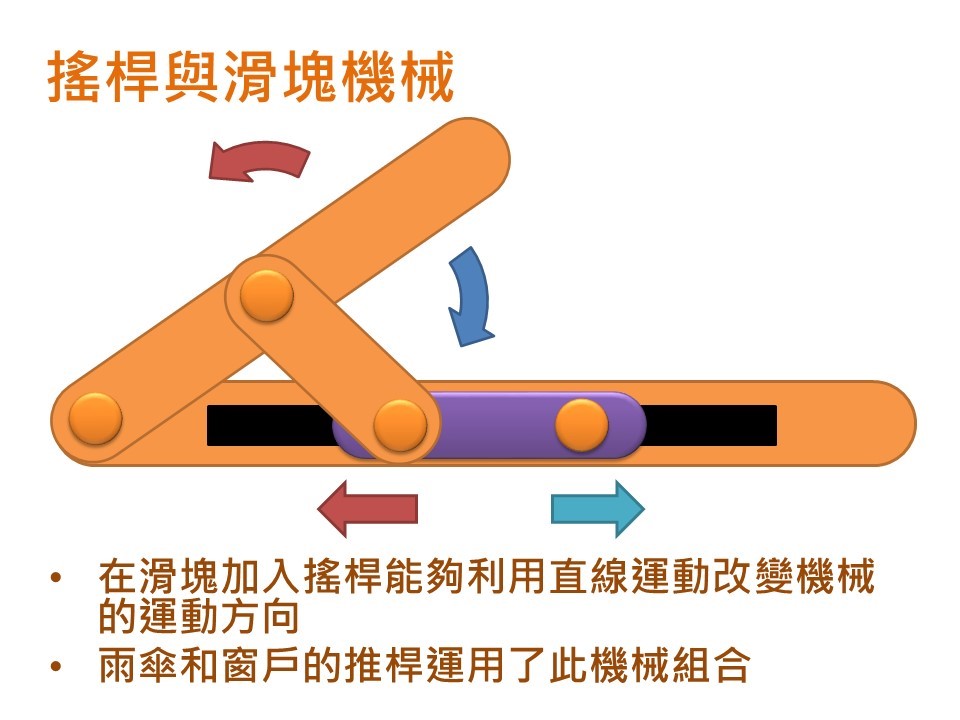
在液壓機器人手臂中,由五組水壓動力裝置組成,控制機器人手臂不同部分的活動。在機械工具中,經常會用滑塊機械和搖桿機械配合運用來令關節活動。
[row][third_paragraph]
[/third_paragraph][third_paragraph]

[/third_paragraph][third_paragraph]
[/third_paragraph][/row]
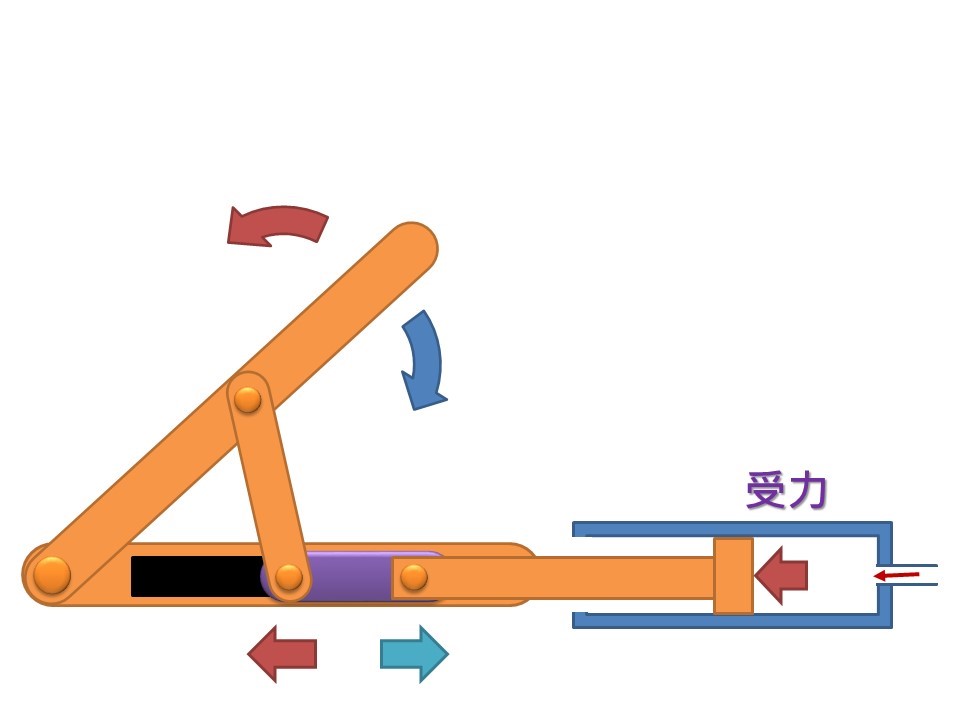
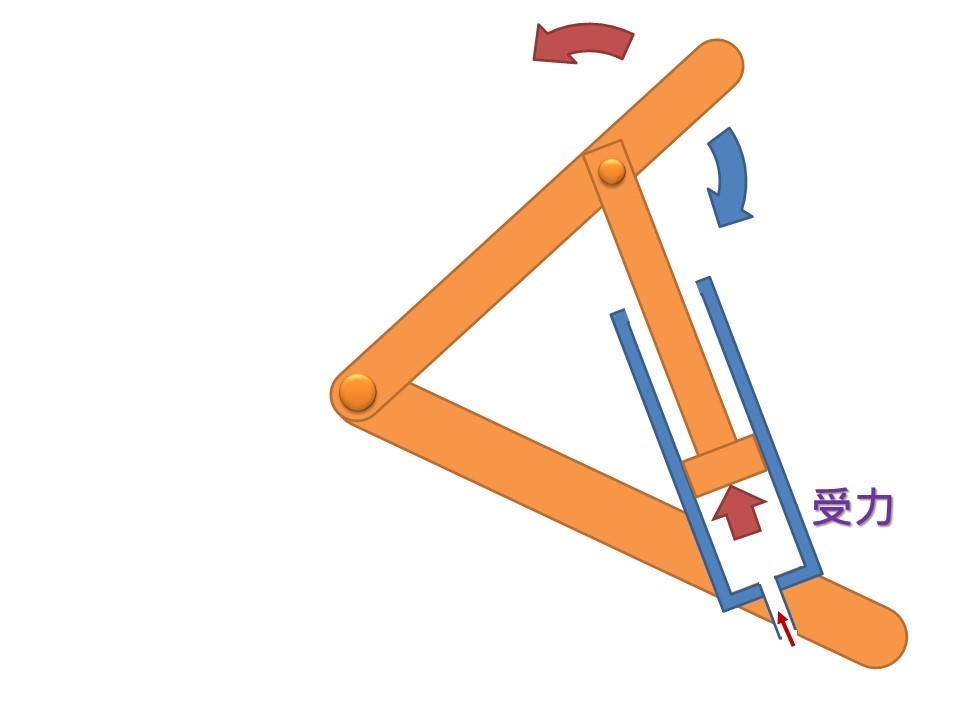
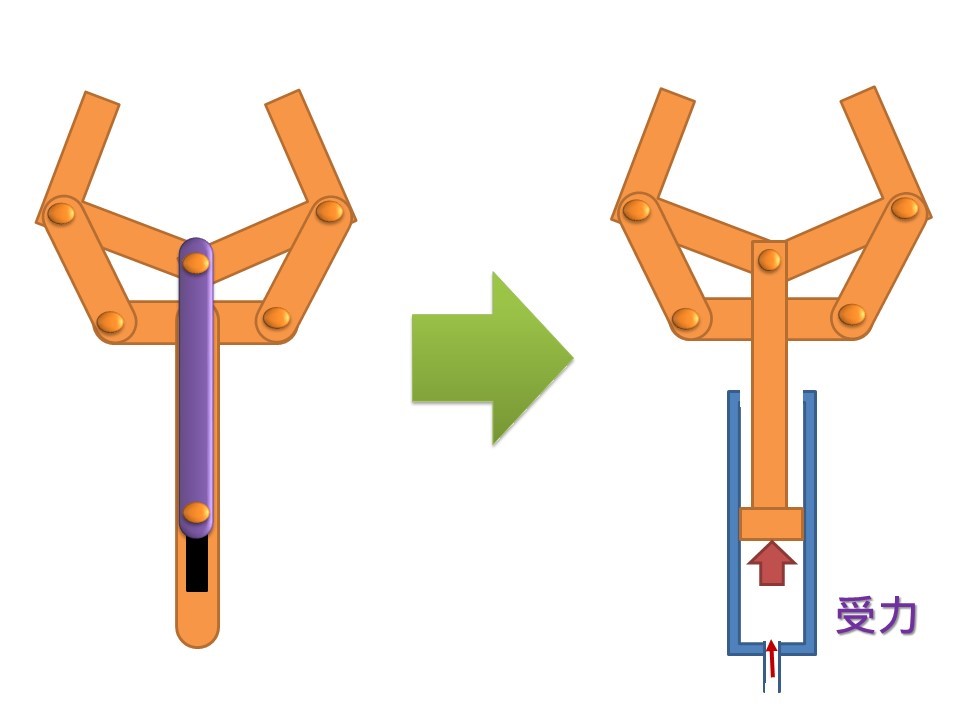
液壓機器人手臂就是利用水壓動力裝置來取代滑塊機械和搖桿機械。
[row][third_paragraph]
[/third_paragraph][third_paragraph]
[/third_paragraph][third_paragraph]
[/third_paragraph][/row]
當每個控制桿都連接著針筒型的液壓筒,利用推拉的方式可改變液壓。此外,若把推桿改成鋸齒狀,能夠配合不同的齒輪組使用,有助做出不同的功能。例如機械鉗的開合效果。
在日常生活中,有很多用品都會應用液壓式或氣壓式的機械原理,控制巴士和港鐵列車車門的開關,以及油壓式門鉸就是運用了此原理。